The way to go is Ardupilot, the most standardized open source platform.
ardupilot.org/
Initially ardupilot was composed of an arduino mega (a very simple computer with the ports to connect sensors) + the sensors to fly all of them integraed.
It has gyroscopes and accelerometers (IMU - Innertial Measurement Unit) to know it's self position and movements in a space, a compass to orientate in the earth and connection for an external GPS to know the location in the world. It also has a barometer to know the altitude (combined with the GPS). With this platform and software you are able to plug into a robot and do basic navigation. You also have the possibility to integrate other sensors eg: laser altimeter for precision landing, airspeed sensor, obstacle sensor...
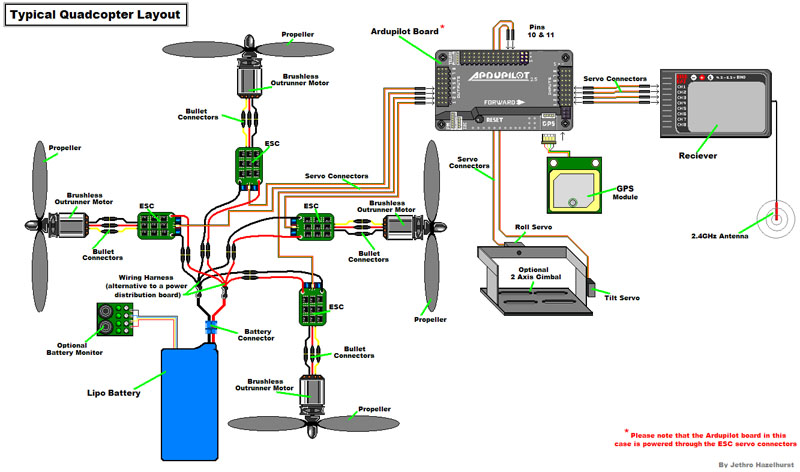
If you want to build a quadcopter, you need a frame and those components
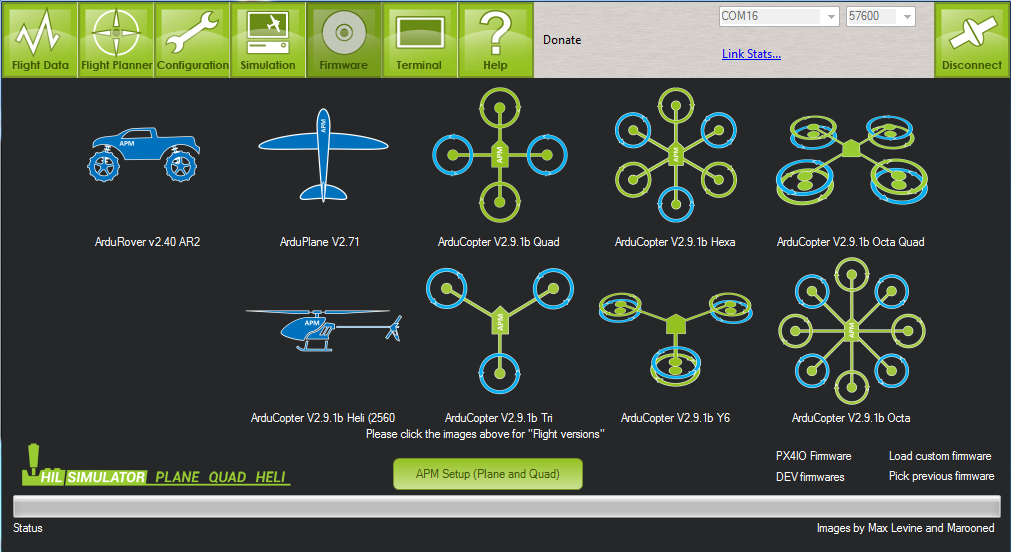
Once the drone is build, you need to enter into the comptuer and setup the configuration
The original ardupilot is now outdated and the actual board is called Pixhawk
Oriol López · Sat 26 Nov 2016 2:28AM
The way to go is Ardupilot, the most standardized open source platform.
ardupilot.org/
Initially ardupilot was composed of an arduino mega (a very simple computer with the ports to connect sensors) + the sensors to fly all of them integraed.
It has gyroscopes and accelerometers (IMU - Innertial Measurement Unit) to know it's self position and movements in a space, a compass to orientate in the earth and connection for an external GPS to know the location in the world. It also has a barometer to know the altitude (combined with the GPS). With this platform and software you are able to plug into a robot and do basic navigation. You also have the possibility to integrate other sensors eg: laser altimeter for precision landing, airspeed sensor, obstacle sensor...
If you want to build a quadcopter, you need a frame and those components
Once the drone is build, you need to enter into the comptuer and setup the configuration
The original ardupilot is now outdated and the actual board is called Pixhawk

